Human Recognition via Gait Identification using Accelerometer Gyro Forces
Full Paper: PDF
Abstract: Many applications, both cooperative and hostile, require the ability to identify humans. This work proposes a method that exploits the biometric property of human gait to identify people. A single sensor composed of an accelerometer and gyroscope is used to record gait characteristics. Using a Direct Form II Transpose, gait cycles are extracted and compressed to their characteristic features. Using simple classifiers on these feature vectors, this approach achieves 95% accuracy in classifying gait cycles to individuals. This model-driven approach uniquely exploits the physics of human gait through the use of gyroscope forces and proves its viability for smart environment applications.
Introduction: Many applications, both cooperative and hostile, require the ability to identify people. Biometrics are popular for identifying people because they are difficult to fake and easily produced. Biometrics refer to the various intrinsic or physical signatures people produce that can be used to uniquely identify them. Some examples of biometrics are fingerprints, eye scans and voice. This project focuses on the biometric of human gait and attempts to use a person's gait to identify him or her. Human sensing (i.e., detection or identification), and, in more security-based applications, authentication often use biometrics. Sensing and sensor networks are valuable for many reasons, perhaps the simplest of which is the ability to proactively perform some action based upon the existence of some condition in the observed environment. The work of this project falls within this notion of the "smart environment". See the full paper for more information on the targeted environment.
This work proposes a new approach that uses a single device to measure a person's gait and form a biometric signature based on accelerometer and gyroscope forces. This approach has several unique characteristics:
- It uses an accelerometer and a gyroscope, both of which are increasingly embedded in cellular phones.
- The device is small enough to fit in a pocket.
- The device communicates via Bluetooth with a remote station, which carries out the computation.
- The device must be carried “on the person” of the subject (generally in the pocket of the pants).
For the purpose of this work, the Enhanced Service Area application is the targeted application. Thus, the unique attributes of this approach are advantages.
Related Work and Human Gait: Omitted for space - see the full paper.
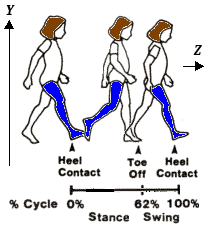
The basic anatomy of the human gait:
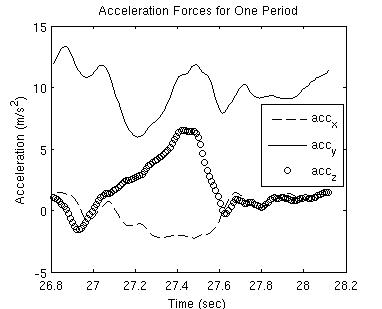
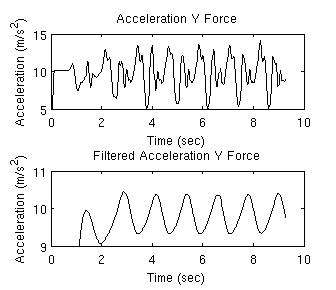
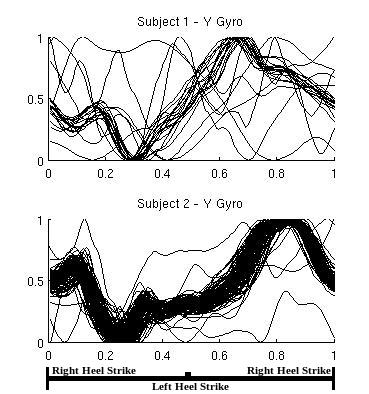
Periodicity & Gait Signature: Omitted for space - see the full paper. A gait cycle is the smallest repeating unit in the signal produced by the accelerometer/gyroscope. We extract periods from the raw output from the accelerometer/gyroscope by filtering the signals with the Direct Form II Transpose. Examples of raw acceleration forces and filtered Y-direction acceleration:
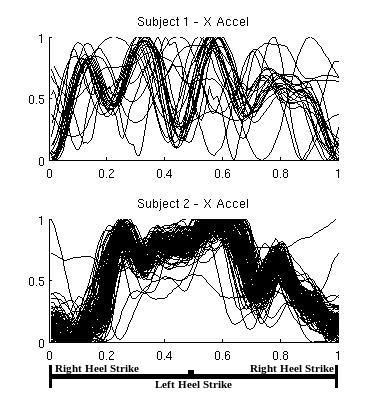
Gait Forces Feature Vector: Omitted for space - see the full paper. The self-similarity of an individual's gait varies but the shape is relatively consistent for a given force across subjects. Thus, we can obtain a "gait signature" for a given test subject by repeatedly capturing and comparing their gait cycles.
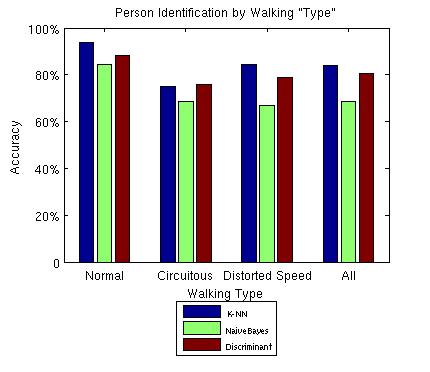
Evaluation: Omitted for space - see the full paper. Simple machine learning algorithms, such as K-nearest neighbor, were able to successfully identify test subjects during normal walking with over 95% accuracy.
Conclusion: This work proposes a biometric method for identifying people based on their gait in cooperative environments. It uses a device that combines an accelerometer with a gyroscope to record the force of a person's walk in 6 directions. Using a direct form transpose filter, gait cycles are extracted from the signals and analyzed for their characteristic features. Finally, the work showed that even simple classification methods are able to identify a person with high accuracy based only on their gait signature.